metal detector robot using pic microcontroller,this robot is designed for metal detection in places where human being can’t reach easily. Metal dectector robot detect metal through metal detector sensor. Its detect metals coming to it ways. Wherever its go, it keep detecting metal. In case of metal detection, a sound will be produced at the control room or receiver side. This article will give you brief idea about how metal detector robot works. How to design metal detector robot using pic microcontroller. Components of metal detector robot and Working of metal detector robot.
Applications of metal detector robot :
Metal detector robot can be used in many industrial applications. Some of them are given below :
- Metal detection in mines
- Metal detection in remote areas
- secuirty system and many others.
Compoenets of Metal detection robot :
Main components of metal detector robot is given below :
- Liquid crystal display ( LCD ) 16x 2
- Radio frequency transmitter and receiver 433MHz
- HT 12E, HT 12D encoder and decoder.
- PIC16F877A microcontroller
- Resistors
- capacitors
- crystal oscillator
- Metal detector sensor
- DC motors
- DC motor driver L298N
- Keypad
- Diodes
- Light emitting diode
- buzzer
Metal detector robot use radio frequency transmitter and receiver interfaced with microcontroller to send and recive data. Infrad transmitter and receiver can also be used but it have less range than radio frequency transmitter and receiver. Metal detector robot consists of a transmitter and receiver part. Receiver part is used to recive data from metal detector part and send commands to metal detector robot using keypad. It is also used to control robot. Circuit diagrams of both are given below:
Circuit diagram of receiver part:
Circuit diagram of receiver is shown below. It consists of of RF receiver and encoder. Encoder coverts the microcontroller PIC16F877A signals into receiver signals.

Receiver part of metal detector robot consists of RF receiver which receive commands from RF transmitter. It receive commands to move left, right,reverse and forward. Metal detector sensor is also connected with receiver part. In case of metal detection, buzzer start producing sound or alaram start working, In above circuit diagram, no alaram or buzzer is used. But you can use buzzer also. PIC16F877A microcontroller microcontroller is used to control all the things. A code code can be written using Mikro c complier or any compiler with you feel comfortable. Motor driver 293D is interfaced with pic microcontroller to drive two dc motors. DC motors are used for metal detector robot movement.
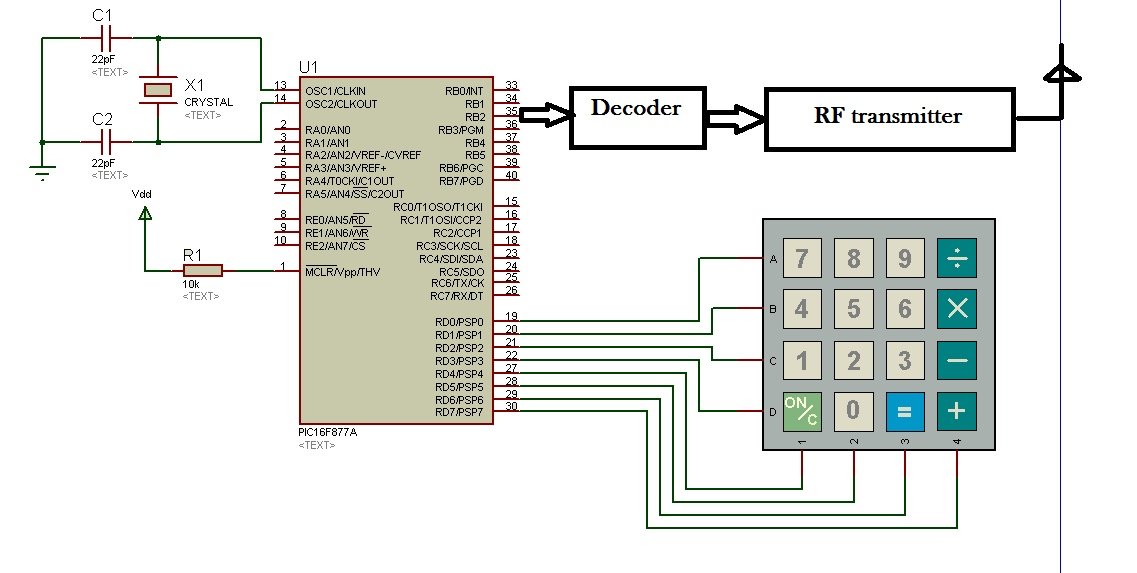
Circuit diagram of transmitter of robot :
Circuit diagram of transmitter is given below. It consists of keypad, RF transmitter, decoder and power supply for PIC16F877A microcontroller. Keypad is interfaced with PIC16F877A microcontroller. Keypad is used to drive robot left, right, reverse and forward.
[button-brown url=”http://store.microcontrollerslab.com/product/metal-detector-robot-using-pic-microcontroller/” target=”_self” position=”center”]click here to purchase code and circuit diagram[/button-brown]
you can use any kind of keypad. You just have to write code to specify fuction of each button of keypad. This metal detector project is just about the idea of robotic project. You can write code for this project. I recommend to write code for this robot. If you feel any issue while writing code, let me know with your comments.
Hola maestro, estoy empezando con los PICs , y los modulos RF, tengo problemas para enviar y recibir datos por RF , cuando le conecto un cable de un PIC a otro anda bien pero cuando lo cambio por los modulos RF no anda, me dijeron que tenia que programar en el pic un codigo corrector , no se como se hace , alguna ayuda, desde ya gracias. Buenisima la Pagina
sir HT12d and HT12E are available in Pakistan ?
where is the programing code on both side.please send me. my email is md.mejbauzzaman@gmail.com
Did you get the Code?
Please I need it if you don’t mind
send me the program code pleas. i really need it in my project 🙁
here is my email
liezeldan27@gmail.com
thanks please send the code my Email address is getachewg99@gmail.com
I would like to see the code for mplab IDE
Please send me code for this project.
My email address is anees.ahmed313@gmail.com
I also need the code for this beautiful project as soon as possible cos am much interested and want 2 use it for an exhibition dat is right at the door
Please mail me the code on shrijaykudale@gmail.com if anybody haves it.
Please
Send me the program for this project
i require a metal detector design for conveyor, but has to be micro controller based. for details please contact.
I am want Micro C code for this project. If anyone have please contact me.