In this tutorial, we will see an introduction to the GNU toolchain for the embedded system build process. Firstly, we will see an introduction to the GNU toolchain and after that, we will discuss how to use the GNU toolchain to compile the ARM Cortex M4 microcontroller using the Linux command line without using any IDE. In short, this tutorial includes compilation, linking, and uploading code to ARM cortex M4 microcontroller using GNU toolchains. But you can use the same process for other microcontrollers also which GNU toolchains support. In the end, we will see how to transfer the binary generated images from the host machine to the target device.
Embedded Systems Build Process
Embedded systems build process usually involves a host machine ( powerful computer) and resource-constrained target devices such as microcontrollers. The tools required to build embedded systems installed on the host machine. Because the target device does not have enough resources to install operating systems or embedded built tools such as GNU toolchain. Therefore, we generate a binary image or executable file for the target device using a host machine and compile the application code on a host machine using various tools.
What is Cross Compilation?
The process of generating executable code by using cross toolchains on the hosting machine and created executables runs on the target machine is known as cross-compilation. Because we compile executable code on the host machine that runs on the other machine such as target devices i.e. microcontrollers. The main difference between native compilation and cross-compilation is that in a native compilation, the generated executable runs on the same machine.

In short, the build process environment for embedded systems runs on the host machine. The host machine generates an executable code that runs on the target embedded device.
GNU toolchains Introduction
GNU toolchain consists of many tools required for embedded system build processes such as preprocessor, compiler, assembler, linker, locator, loader, and debugger. In an embedded system, we usually write embedded applications in c programming language. Your application code goes through various binaries to get an executable file for a target device. GNU cross-compilation toolchain is a collection of these binaries. GNU toolchain also sometimes refers to the GCC toolchain.
Now lets first discuss the function of each compilation step one by one:
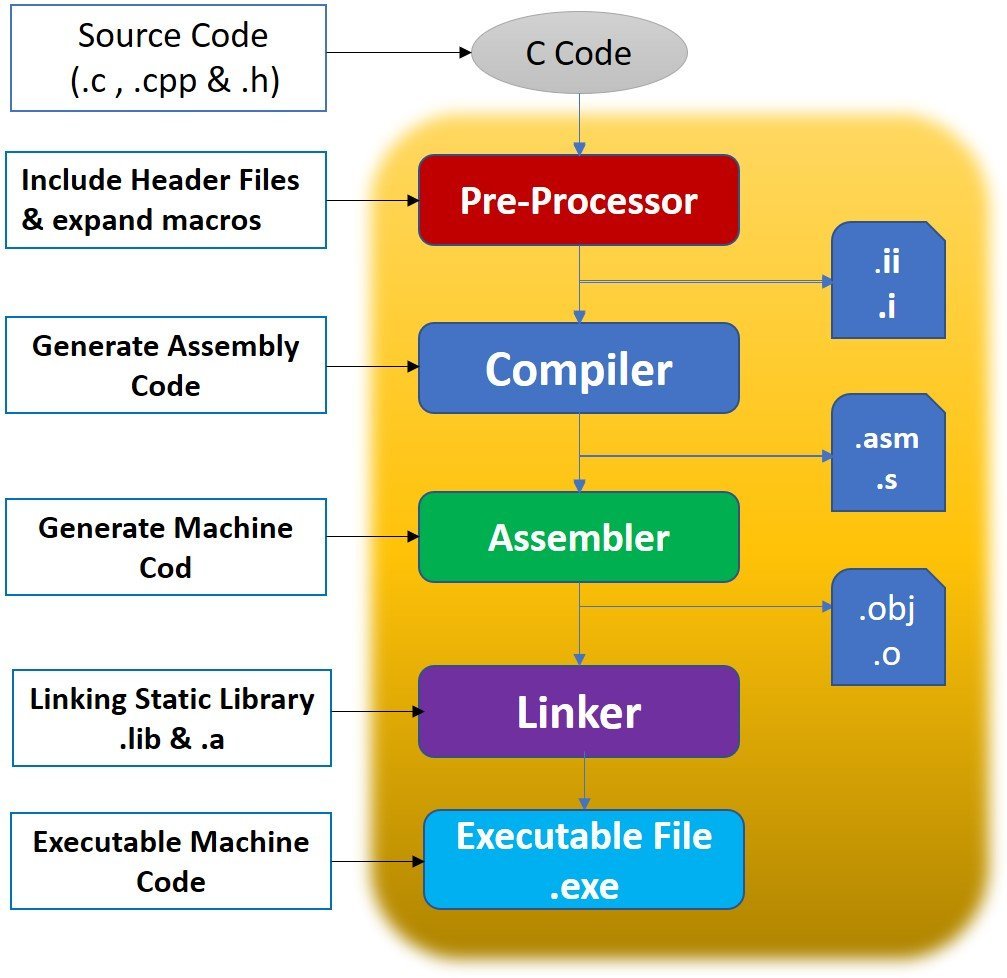
Preprocessing
It performs preprocessing on application source codes ( C files and header files) by replacing macros, including header files, and performing conditional compilation.
Compiler
In this stage, the GCC compiler converts the c code into assembly code. The output file extension is a .s file.
Assembler
The output of the compiler is fed into assembler. The assembler converts the assembly code into an object code. The object code is actually a machine code and assembler generates object code according to selected microcontroller or microprocessor instruction set architecture. Your embedded application may have reference to built-in libraries and more than one source code file. Therefore, the assembler may generate multiple object files. In short, the assembler generates a microcontroller architecture-specific machine code without absolute addresses.
Linker
The assembler generated multiple object files and these object files have references with each other like function calls from other files or use of global variables from other files. Hence, the role of the linker is to combine multiple object files into a single file and also resolve references between these multiple object files using symbols and references table. Linker provides a relocatable file.
Locator
The role of the locator is to perform a memory map according to the selected microcontroller memory map. The locator gets the output file of the linker and maps the code and data into microcontroller memory by providing actual addresses to code and data. It actually defines in which memory region of microcontroller code and data will be saved. Finally, the output of this stage will be ready to use executable code.
Now, we install this executable file on our target device using a loader. Later on in this tutorial, we will see how to use the GNU toolchain loader to upload code to a target device.
Note: C compilation process is architecture-dependent. That means, once you compile source code for a specific microcontroller architecture, it will not run on any other microcontroller having different instruction set architecture.
In summary, the GNU toolchain provides binaries that help to generate and analyze executable files for bare-metal embedded systems:
- Compilating and generating the executable file for a target embedded device
- Analyzing Memory layout of the generated image
- Provide many standard C libraries
- Features to convert an executable file into binary and hex file formats
Install GCC toolchain for ARM Microcontroller
In this section, we will see how to download and install the GCC cross compiler toolchain for ARM microcontrollers. On one Linux based host machine, we can install multiple native or cross-compilers toolchains. GCC toolchains are available in /usr/bin/ directory in Linux. In order to find the list of already installed GCC toolchains on your machine, execute this command on Linux command-line interface.
$ ls -la /usr/bin/*gccOn my machine, I got output like of above command like this:

According to this output, only native gcc compiler is installed on my machine along with C89 and C99 standard libraries.
Now let’s see how to install the GCC cross compiler toolchain for bare metal embedded ARM microcontrollers.
First, run this command to update the latest packages and repositories.
sudo apt-get update -yAfter that run this command to install GCC cross-compilation toolchain for bare metal ARM microcontrollers.
sudo apt-get install -y gcc-arm-none-eabiDepending on your system and internet speed, it will take around 5-10 minutes for the installation process to complete. Now again, In order to find the list of installed GCC toolchains on your machine, execute this command on the Linux command-line interface.
$ ls -la /usr/bin/*gccThis time you will see that GCC compiler for ARM architecture target devices is also available now in the available list with the name of “gcc-arm-none-eabi“.

Note: The code compiled with gcc-arm-none-eabi cross compiler will not run directly on the host machine. Because executable file generated with ARM cross compiler is architecture-dependent. Similarly, the code compiled with native GCC compiler will also not work on a target devices such as ARM microcontrollers.
Furthermore, you can see all the tools of ARM cross compiler by running this command:
ls -la /usr/bin/arm-none-eabi*ARM Cross Compiler Important Commands
These are the important binaries provided by GNU toolchain and they are the most frequently used binaries in the embedded systems building process.
- Arm-none-eabi-gcc: This binary creates an executable file by performing compilation, assembling, and linking steps. Hence, with this one command, we create an executable file for embedded applications.
- Arm-none-eabi-as: This command converts assembly language source code into the architecture-specific machine code.
- Arm-none-eabi-ld: This command is used when we want to use our own linker script. We will talk about the linker script file in coming articles.
These three commands are used to analyze files such as object file, memory map etc.
- Arm-none-eabi-objdump
- Arm-none-eabi-readelf
- Arm-none-eabi-nm
Cross Compiling Code for ARM Microcontroller
Now let’s take an example code and see how to cross-compile for ARM-based target devices. The example code is shown below:
static int j = 25;
static int i = 10;
int sum = 0;
void main()
{
sum = i+j;
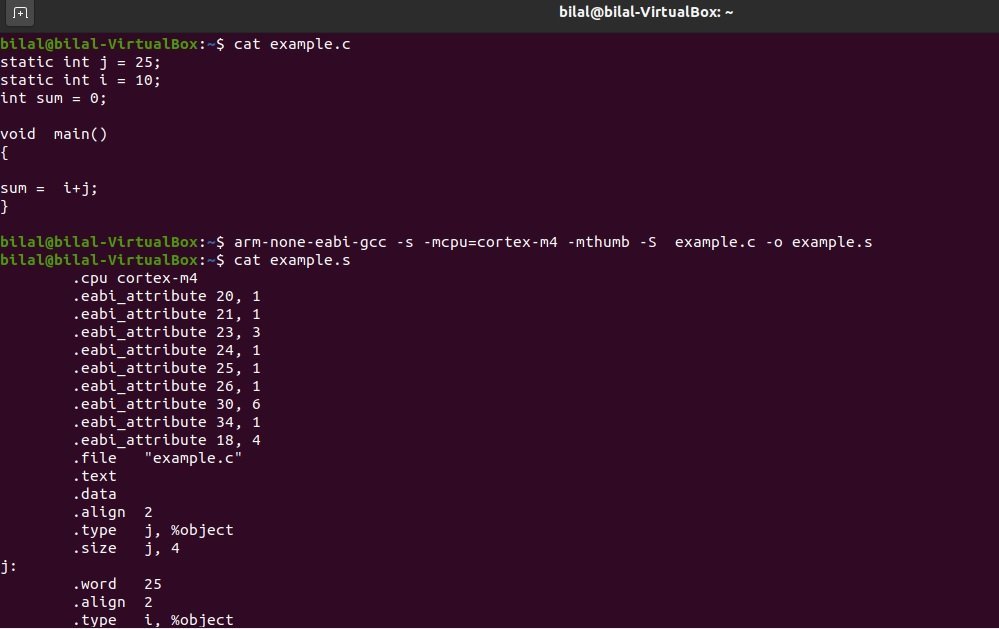
}This command converts the above-given code into assembly language. This command will just create an assembly file. In other words, only preprocessing and compilation steps will be performed. Here -s will stop the arm GCC after the stage of compilation. As you know the compiler converts c source files into assembly files.
More information on Gcc compiler controlling options are available on this link.
rm-none-eabi-gcc -c -mcpu=cortex-m4 -mthumb -S example.c -o example.s
arm-none-eabi-gcc -mcpu=cortex-m4 -mthumb -S example.c -o example.s- -o option places the compiler output file in example.s file
- -mcpu=cortex-m4 specifics the architecture of ARM device
- -mthumb mentions the architecture mode of cortex M4. Because arm cortex m4 microcontroller works in thumb mode only.
The output of the above command generates an assembly file:
Similarly, by using the proper compiling option, we can create an executable and object files, etc.
Creating and analyzing relocatable object file
In this section, we will see how to create an object file using the ARM GCC cross compiler and analyze the content of the object file using objdump tool of the GNU toolchain.
Object files (.o) have different formats. For example, GCC generates an ELF format that is an executable and linkable format Other commonly used file formats are COFF, AIF, etc. A file defines the process to store different types of data in different sections of program memory such as .data, .bss, .rodata, and code sections.
For more information on memory organization in a microcontroller, you can read this article:
Different types of memory in microcontrollers
First, let’s create an object file of above given example code by using this command:
arm-none-eabi-gcc -c -mcpu=cortex-m4 -mthumb example.c -o example.oThis command will save the object file inside an example.o file.
objdump tool
GCC provides rm-none-eabi-objdump binary to analyze various section of the relocatable object file. If you simply run this command in a Linux command line, you will get all options that are available with this command to analyze object file as shown below:
rm-none-eabi-objdump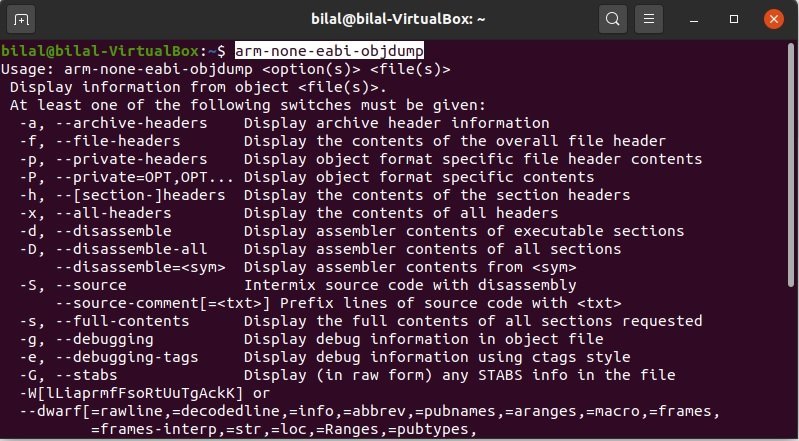
For example, -h option displays the different section of memory such as .data, .bss, .rodata, and code sections. Lets analyze the sections of previously created example.o file using this command:
arm-none-eabi-objdump -h example.oThe output shows the different section:
example.o: file format elf32-littlearm
Sections:
Idx Name Size VMA LMA File off Algn
0 .text 00000028 00000000 00000000 00000034 2**2
CONTENTS, ALLOC, LOAD, RELOC, READONLY, CODE
1 .data 00000008 00000000 00000000 0000005c 2**2
CONTENTS, ALLOC, LOAD, DATA
2 .bss 00000004 00000000 00000000 00000064 2**2
ALLOC
3 .comment 0000005a 00000000 00000000 00000064 2**0
CONTENTS, READONLY
4 .ARM.attributes 0000002e 00000000 00000000 000000be 2**0
CONTENTS, READONLY
In the coming tutorials, we will see how to download executable to stm32 using GNU toolchains.
You may also like to read:
Nice work, looking into your upcoming works
A great start
Is the second part puplished or not? How to download code to STM32 using GNU toolchain?
nice post