In this tutorial, we will show you how to use STM32 Nucleo UART in interrupt mode to transmit and receive data. We will use STM32CubeIDE to create a project where we will use UART interrupt of STM32 Nucleo to receive data on the Rx pin via interrupt and we will send serial data through a serial terminal by using a USB-TTL converter. As soon as STM32 receives data, it will transmit it back to the serial terminal to display.
As opposed to the polling method where data reception occurs in blocking mode, in UART interrupt mode it is the opposite. The data reception occurs in the background with non-blocking mode. Here, however, a callback function is called after the data reception finishes.
Let’s create and build a project in CubeIDE to learn more!
Recommended Components
The following components are used in this project or are helpful for getting started with STM32 Nucleo development.
| Component | How it’s used in this project | Buy on Amazon |
|---|---|---|
| STM32 Nucleo Board (NUCLEO-F103RB) | The STM32 Nucleo-64 development board used in this project. | Check Price |
| Micro USB / Mini-B USB Cable | Type-A to Mini-B cable to program and power the Nucleo over its onboard ST-Link. | Check Price |
| USB-TTL / FTDI Serial Adapter | USB-to-serial adapter to view UART data on your PC. | Check Price |
| Jumper Wires | Connect the Nucleo UART pins to the USB-TTL adapter. | Check Price |
As an Amazon Associate we earn from qualifying purchases. Prices and availability are accurate as of the date/time indicated and are subject to change.
As discussed earlier, we will be using STM32CubeIDE, therefore, you should have the latest version installed on your system. You can follow this guide to install it:
Why use UART Port of STM32 Nucleo F103RB?
Whenever we work on embedded system applications development sooner or later we need to use a serial communication protocol. We often use UART/USART to transfer data between microcontroller and computer for various purposes. One of the most important applications is to display data on the serial console of the computer for debugging or logging important events during program execution on a microcontroller. Furthermore, many wireless devices such as GSM, GPS, Bluetooth, Xbee, LoRA, and many others provide a serial interface to transfer data between these devices and a microcontroller.
In a previous tutorial, we looked upon Nucleo F103RB UART Communication and how to send and receive data using the polling method:
Difference Between Interrupt and Polling Method
As we have seen in the last STM32 Nucleo F103RB UART tutorial, In the polling method, microcontroller will do nothing except polling the state of the RX pin. Therefore, it is kind of a waste of microcontroller processing time and resources. On the contrary, by using an interrupt-driven approach, microcontroller does not have to keep checking the status of Rx pin instead a callback will be triggered once data is received and ready to use. But if data is not available, a microcontroller can execute other parts of the code.
The difference will become more clear to you when you see the actual working of STM32 UART interrupt code in the later sections of this tutorial.
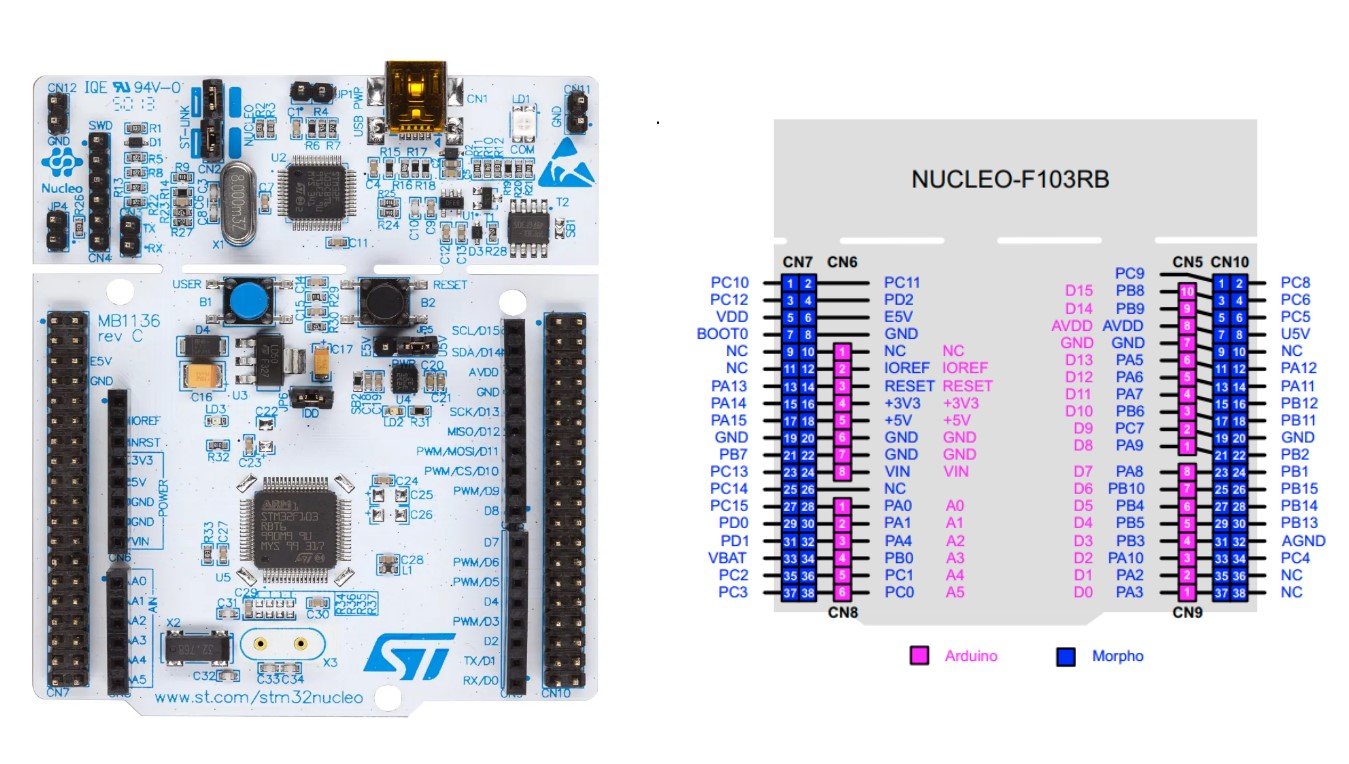
STM32 Nucleo F103RB UART Ports
Nucleo F103RB STM32 consists of three UART modules: UART1, UART2, and UART3.

We can use any UART module for serial data transmission. However, unlike Blue Pill STM32 microcontroller board, Nucleo F103RB has an onboard ST-Link debugger. Therefore, if we do not want to use a USB-TTL converter, we have to use UART2 on PA2 and PA3.
One important thing to keep in mind is that pins for UART1 and UART3 are 5V tolerant however pins for UART2 are standard 3.3V pins.
STM32 Nucleo F103RB UART Interrupt Example
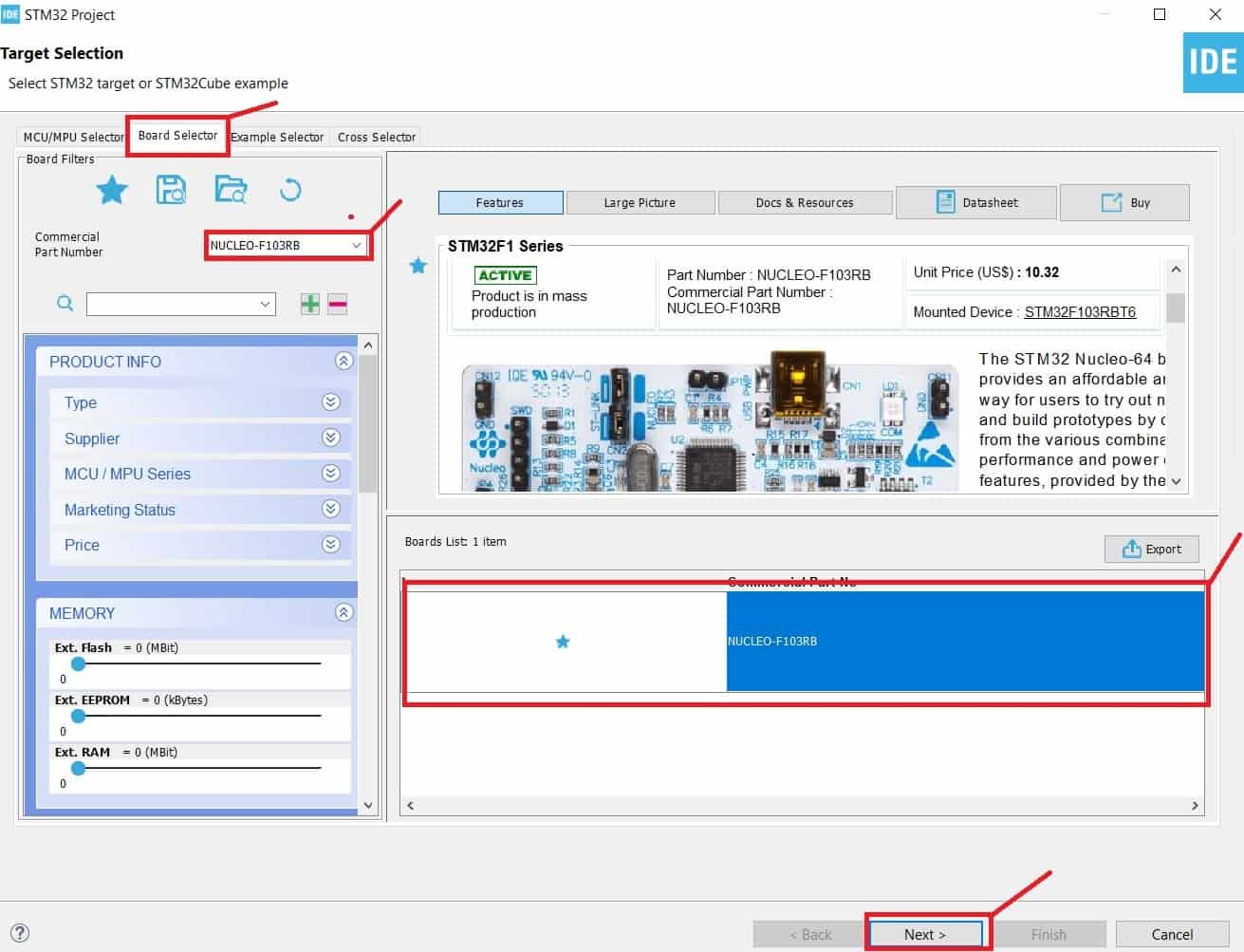
We will use STM32Cube IDE to program our STM32 board. Open the IDE and head over to a new project.
Then for the target selection, specify the STM32 Nucleo F103RB board number. After that click on any column as shown in the picture below. Then click the ‘Next’ button.
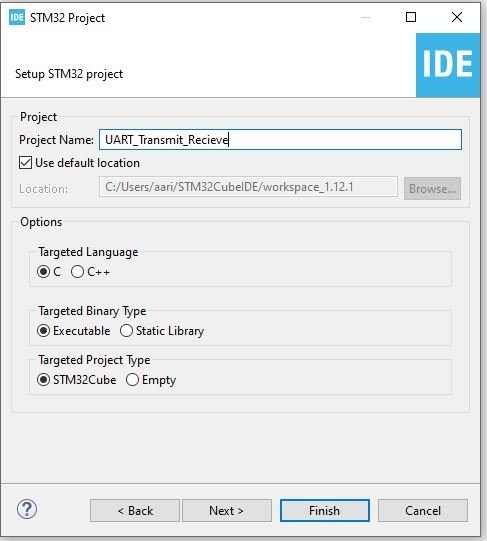
Specify the name of your project then click ‘Finish’ to complete the setup of your project.
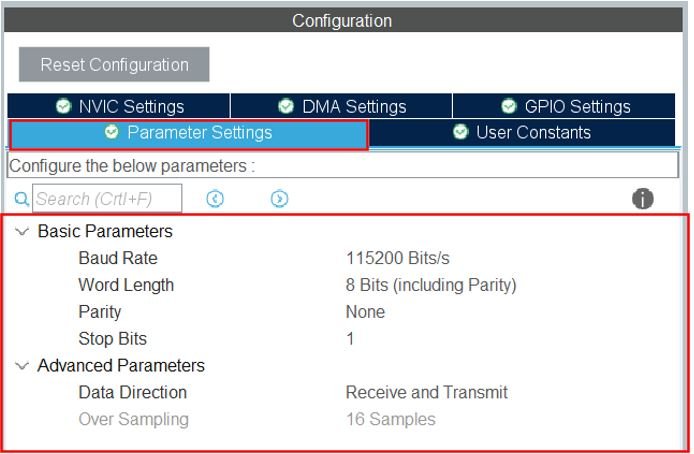
Now head over to Connectivity > USART2 and set the mode as ‘Asynchronous.’ Then head over to NVIC Settings under configuration and enable the USART2 global interrupt. This will enable UART global interrupt and also enables it in nested vectored interrupt controller (NVIC). You can learn more about NVIC here:
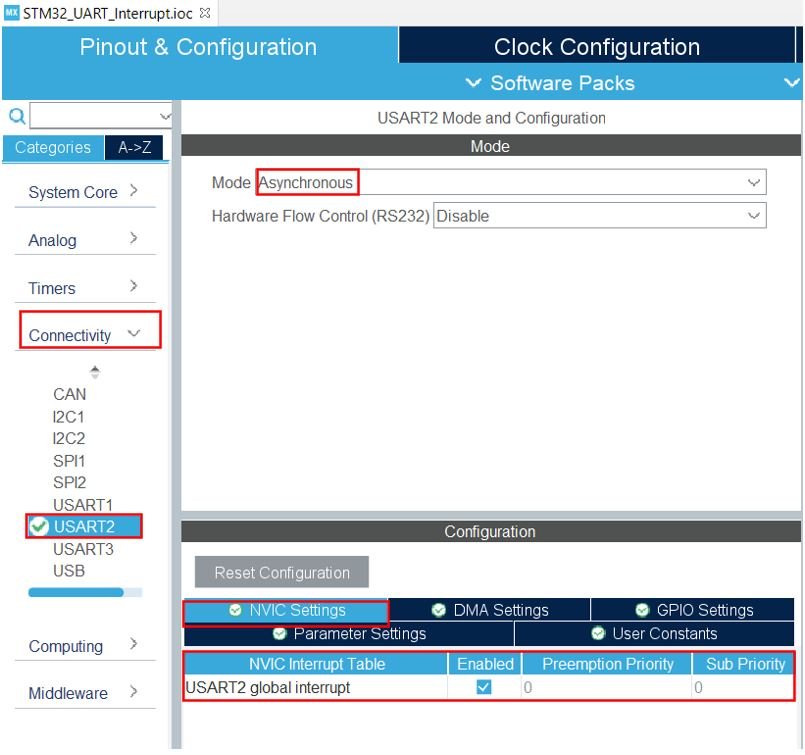
You can view the parameter settings of the UART including the baud rate, word length, parity, etc.
Now go to System Core > RCC then select ‘Crystal/Ceramic Resonator’ in from the High Speed Clock feature.

Now we have enabled the RCC external clock source.
Clock Configuration
Next, go to the Clock Configuration found at the top. This will open the following window. Here we will select the clock frequency.
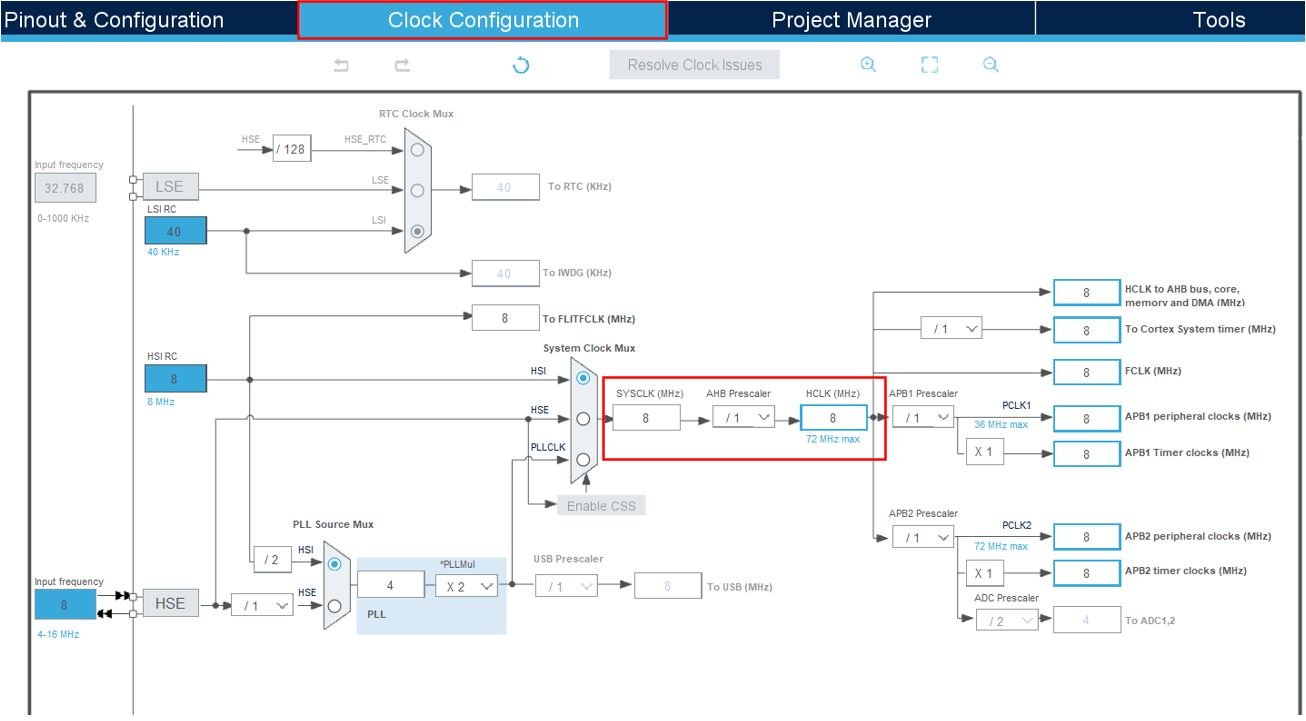
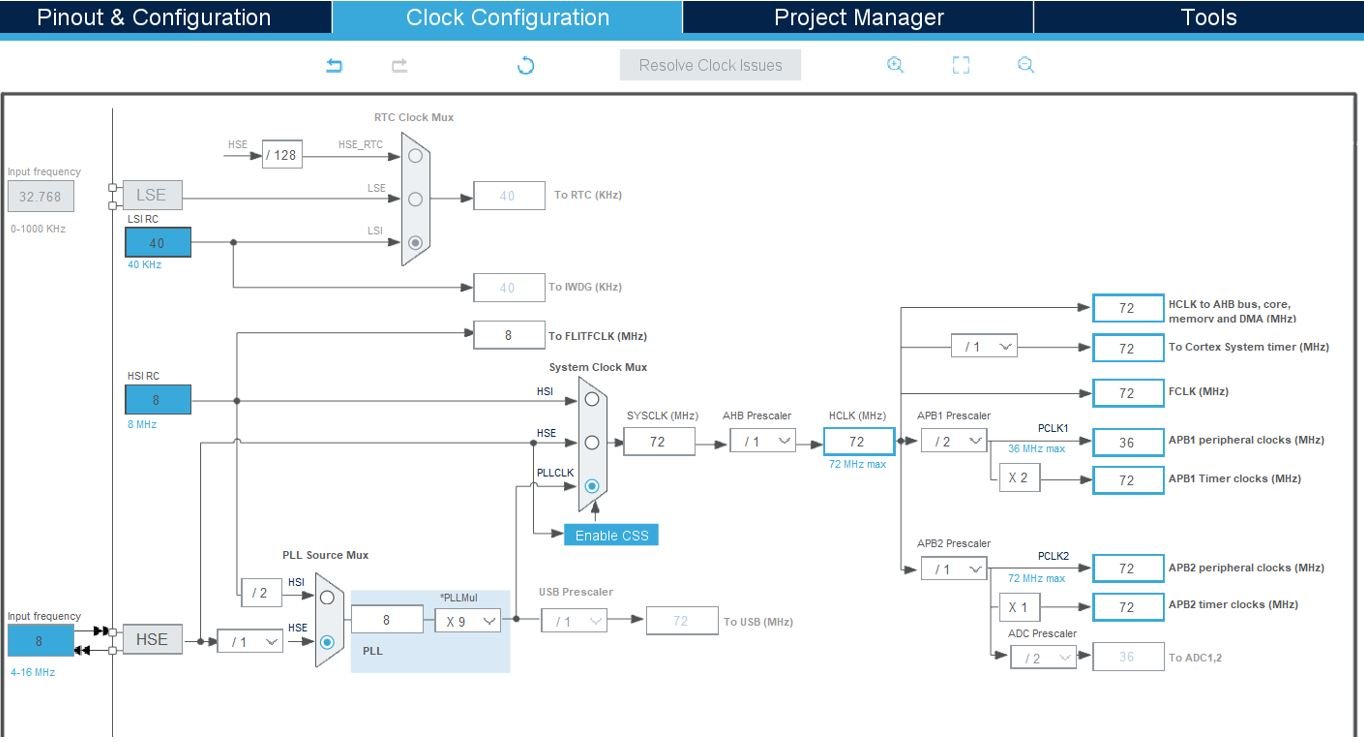
You can specify your system clock. We will set it as 72 MHz. These are the configurations we have set:
Now we will save our file. Press Ctrl + S. The following window will appear. Click ‘Yes.’ This will generate a template code for you.
Another window will appear that will ask if you want to open the perspective. Click ‘Yes.’
STM32 Nucleo F103RB UART Interrupt Code
Now the following page opens. On the right side, you will be able to view the Outline of the code. This happened because we opened our code with perspective. In the center, you can view the main.c file. If you want to go to the Device Configuration Tool, then click the .ioc tab.

Now let us look at our main.c file that was generated.
Modifying Code
We will set up a code in which STM32 Nucleo F103RB will echo back the received bytes to the sender using UART RX interrupt. The code will echo back whatever it will receive on the Rx pin to the terminal. In other words, whatever you type on the serial terminal, it will be sent to the STM32 Nucleo F103RB and STM32 will transmit it back to the computer.
Inside the main.c file, look for the int main() function. Copy the code given below in the main() function.
uint8_t UART2_rxBuffer[26] = {0};
int main(void)
{
uint8_t message[35] = {'\0'};
uint8_t num = 0;
char Message[] = "Write anything on Serial Terminal\r\n"; /* Message to be transmitted through UART */
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART2_UART_Init();
HAL_UART_Transmit(&huart2, (uint8_t *)Message, strlen(Message), 10);
HAL_UART_Receive_IT(&huart2, UART2_rxBuffer, 26);
while (1)
{
}
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
HAL_UART_Transmit(&huart2, UART2_rxBuffer, 26, 100);
HAL_UART_Receive_IT(&huart2, UART2_rxBuffer, 26);
}How Does Code Work?
First, create a receiving buffer of 26 bytes called UART2_rxBuffer outside the main() function. This will hold the data whenever STM32 will receive data via UART interrupt.
uint8_t UART2_rxBuffer[26] = {0};UART Interrupt Call Back Function
The HAL_UART_RxCpltCallback() function is called when data reception is completed. This function is known as Rx Transfer completed callback. It takes in a single parameter ‘huart’ which is the pointer to the UART_HandleTypeDef structure containing the configuration parameter for the specified UART module. Inside this function, new data transmission and reception is initiated so that the continuity of the transmission/reception of data remains. This will ensure the data transfer occurs in a non-blocking mode.
One important point to note here is that we have specified the received buffer size (UART2_rxBuffer) and its size is 26 bytes. Therefore, this HAL_UART_RxCpltCallback function will be only triggered once Rx transfer has comletely recieved 26 bytes. But one can change it according to its requirement.
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
HAL_UART_Transmit(&huart2, UART2_rxBuffer, 26, 100);
HAL_UART_Receive_IT(&huart2, UART2_rxBuffer, 26);
}HAL UART Data Receive Interrupt Function
HAL_UART_Receive_IT() function is responsible for receiving an amount of data in non-blocking mode. This function enables UART data reception in intrrupt mode and defines size of data to be recieved.
HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef * huart,
uint8_t * pData,
uint16_t Size) This function takes in three parameters.
- The first parameter is the pointer to the UART_HandleTypeDef structure containing the configuration parameters for the specified UART module.
- The second parameter is the pointer to the data buffer which holds the received data.
- The third parameter is the size of data to be received.
main.c file
This is how a complete main.c file will be after modification.
#include "main.h"
uint8_t UART2_rxBuffer[26] = {0};
UART_HandleTypeDef huart2;
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART2_UART_Init(void);
int main(void)
{
uint8_t message[35] = {'\0'};
uint8_t num = 0;
char Message[] = "Write anything on Serial Terminal\r\n"; /* Message to be transmitted through UART */
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART2_UART_Init();
HAL_UART_Transmit(&huart2, (uint8_t *)Message, strlen(Message), 10);
HAL_UART_Receive_IT(&huart2, UART2_rxBuffer, 26);
while (1)
{
}
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
HAL_UART_Transmit(&huart2, UART2_rxBuffer, 26, 100);
HAL_UART_Receive_IT(&huart2, UART2_rxBuffer, 26);
}
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief USART2 Initialization Function
* @param None
* @retval None
*/
static void MX_USART2_UART_Init(void)
{
/* USER CODE BEGIN USART2_Init 0 */
/* USER CODE END USART2_Init 0 */
/* USER CODE BEGIN USART2_Init 1 */
/* USER CODE END USART2_Init 1 */
huart2.Instance = USART2;
huart2.Init.BaudRate = 115200;
huart2.Init.WordLength = UART_WORDLENGTH_8B;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART2_Init 2 */
/* USER CODE END USART2_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
Save the main.c file after modifying it. Now we are ready to build our project.
Building the Project
To build our project press Ctrl + B or go to Project > Build All.
Your project will start building. After a few moments, your project will be successfully built if there are no errors.
Running the Project
Next press the RUN button in the IDE. The ‘Edit configuration’ window will open up. Click ‘OK’.

After a few moments, the code will be successfully sent to the STM32 board.
Otherwise, press the RESET button on your STM32 board.
Open Device Manager and head over to Ports to check the COM port through which the STM32-Nucleo103RB board is connected. It is COM5 in our case.
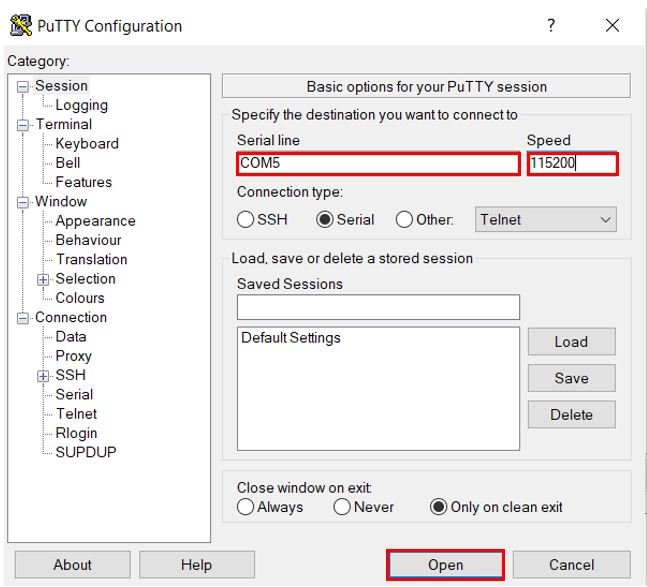
Open a terminal on your system for example Putty. Set the correct speed and COM port and then press Open to establish a connection.
Press the Reset button of STM32 and the message appears “Write anything on Serial Terminal.” Now type any characters and they will get displayed in the terminal.

Conclusion
In conclusion, this tutorial demonstrated how to utilize STM32 Nucleo UART in interrupt mode for transmitting and receiving data efficiently. Unlike the polling method, the UART interrupt mode allows data reception to occur in the background without blocking other processes, improving performance. By using STM32CubeIDE and a USB-TTL converter, we successfully created a project that receives data via UART interrupts and sends it back to a serial terminal. This approach highlights the advantage of non-blocking communication, making UART interrupt mode ideal for applications requiring efficient data handling.
You may also like to read:
You could probably clean this code up a little bit. The `message` array is unused, along with `num`. Also, I have a Nucleo32 and I’m not getting anything coming back on a serial monitor. I did attach a scope to the onboard STLink TX and RX pins and through that I can see the `Message` to type anything. However nothing shows up at all in the serial monitor. Is there more setup that needs to happen so that the STLink connection is written to from the UART?
You need to connect USB to TLL converter with UART pins. In this example, we are using UART1 which is not connected with
In the tutorial:
We can use any UART module for serial data transmission. However, unlike Blue Pill STM32 microcontroller board, Nucleo F103RB has an onboard ST-Link debugger. Therefore, if we do not want to use a USB-TTL converter, we have to use UART2 on PA2 and PA3.
I read this and assumed that I didn’t need to use a USB-TTL converter because I have a ST-Link debugger as part of the board.
Is it possible to do this without the converter?
Use UART1